
 发布时间:2025-04-02
发布时间:2025-04-02 阅读量:
阅读量:主要完成人

杜梦妮,数学科学学院系统科学专业2023级硕士研究生,师从解相朋教授,研究方向为模糊智能安全防御。目前已发表SCI论文3篇。曾获2023年研究生学业一等奖学金、2024年研究生学业一等奖学金、2024年研究生优秀学生。
创新成果展示
网络化模糊系统广泛应用于自动控制、模式识别、决策分析等领域,这些领域往往涉及大量的数据处理和实时控制。如果系统安全性得不到保障,可能会遭受恶意攻击或数据泄露等风险,导致系统崩溃、控制失效等严重后果。由于非线性系统建模的复杂性,以及网络控制远程传输的特点,使得对网络化非线性系统的建模和控制器,滤波器设计存在困难。本研究实现了在不平整路面激励下的车辆悬架系统遭到多种攻击的恶意攻击检测。提出了一种集员估计和切换多模高阶自由加权矩阵框架,解决了车辆悬架系统在恶意攻击时的攻击检测问题。提出了一种新的滤波器设计方法,即更宽松和灵活地抵抗IDB DoS策略。该方法引入了齐次多项式技术,以发展一种更一般的松弛模糊滤波器设计,可以减少保守性。此外,还保证了新方法将获得更宽松的滤波器增益集,它们更能够响应IDB DoS策略。首次将船舶操纵系统推广到带多种不确定性的随机非线性系统。为了解决这些挑战,所提出的方法包括使用FLSs,辅助函数来生成动态信号,和双曲切线函数。通过结合这些技术,所提出的控制程序非常适合于实际应用。
支撑本研究的各项成果收录在IEEE Transactions on Fuzzy Systems 四篇 (SCI一区Top)、 IEEE Transactions on Instrumentation and Measurement (SCI二区Top)、Applied Mathematical Modelling (SCI二区Top)、 Communications in Nonlinear Science and Numerical Simulation (SCI二区Top)、International Journal of Robust and Nonlinear Control (SCI三区Top)等控制领域权威期刊上,得到了许多国内外专家学者的正面评价。同时,该工作得到了多项山东省自然科学基金资助和国家自然科学基金资助项目的资助。
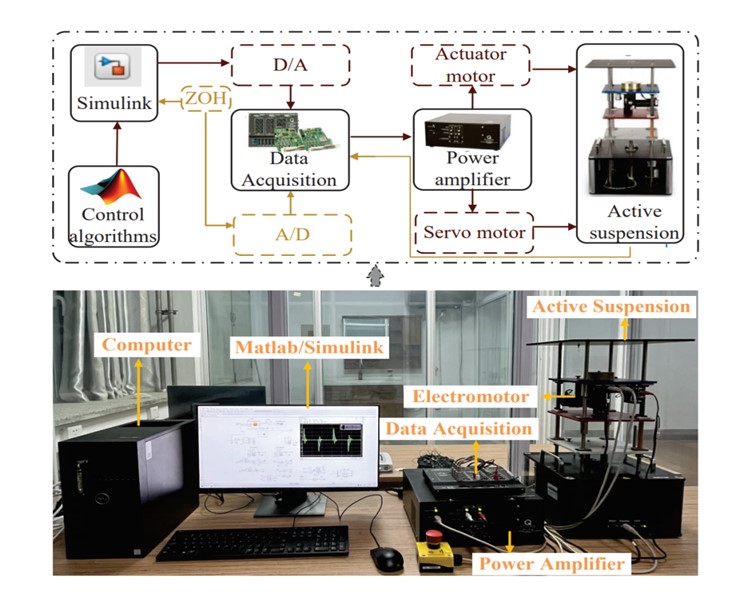
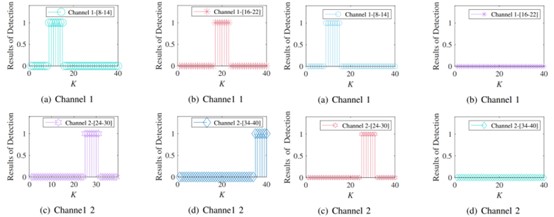
图 1 四分之一汽车悬架系统实验平台及恶意攻击检测效果图
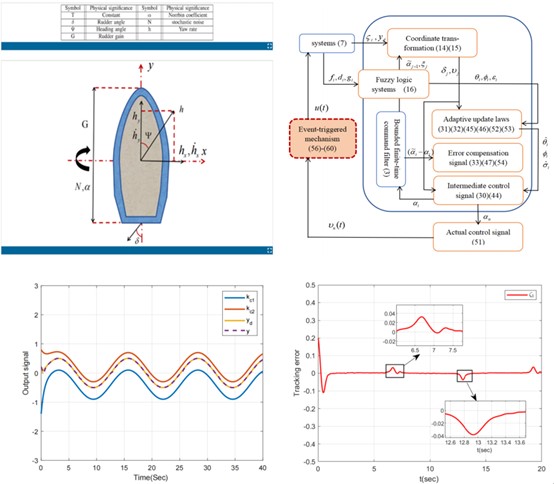
图 2 带多种不确定性的随机非线性系统及有限时间控制策略跟踪效果图
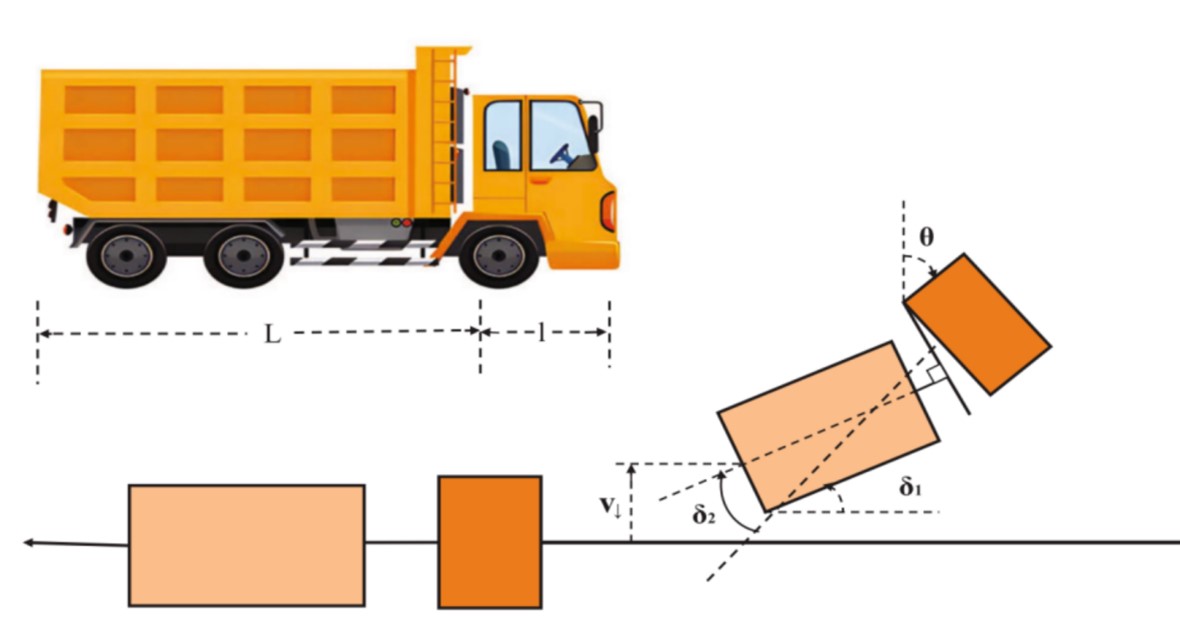
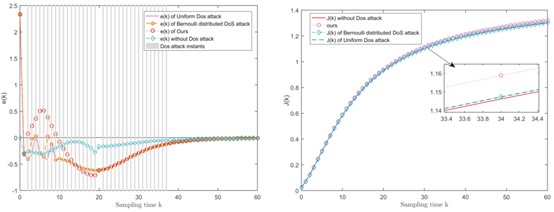
图 3 卡车拖车系统及不同类型DoS模型下的性能指标对比效果图
