
 发布时间:2025-04-02
发布时间:2025-04-02 阅读量:
阅读量:主要完成人

闫城源,数学科学学院系统科学专业2022级硕士研究生,师从夏建伟教授,研究方向为复杂系统的自适应智能控制及其应用。目前已发表学术论文6篇,包括IEEE汇刊论文4篇。曾获研究生国家奖学金,聊城大学研究生优秀成果奖,积极参加学术会议,并在第七届系统科学大会、第二届全驱系统理论与应用会议上完成汇报工作。
创新成果展示
本研究集中在复杂系统智能控制理论与非均匀采样控制器设计,解决了传统方法在大规模电力网络、集成电路及耦合倒立摆等系统的控制难题,提出了一系列结构简单、保守性低的智能优化方案。针对随机网络诱导时延和噪声采样的问题,采用随机离散时间积分二次约束的方法确保系统稳定。通过矩阵维度转换方法解决通信延迟问题,并利用反推偏微分方程和约分常微分方程预测方法提高系统控制性能。最后,针对结构复杂的柔性关节机械臂系统,提出了基于全驱系统方法的自适应跟踪控制方案,并应用于实验平台验证了其有效性和实用性,为现代工业的高效、安全、可持续发展提供了强有力的技术支持。
支撑本研究的各项成果收录在IEEE Transactions on Systems, Man, and Cybernetics: Systems (SCI一区Top)、IEEE Transactions on Fuzzy Systems (SCI一区Top)、IEEE Transactions on Power Systems (SCI一区Top)和IEEE Transactions on Circuits and Systems I: Regular Papers (SCI一区Top)等控制领域权威期刊上,得到了许多国内外专家学者的正面评价。研究成果获得多项国家自然科学基金项目面上项目、泰山学者特聘专家项目、泰山学者青年专家项目、山东省自然科学基金项目的资助。
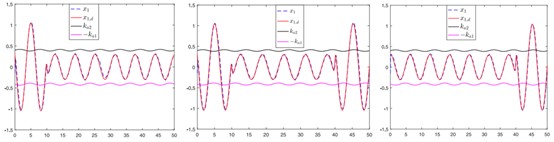
图1 不规则约束条件下的追踪效果图
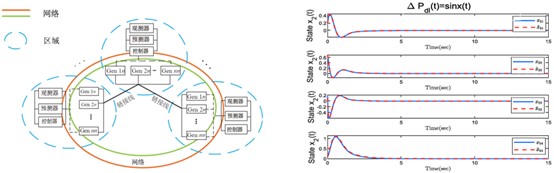
图2 互联电力系统结构及控制效果图

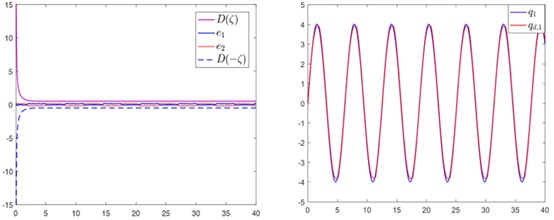
图3 二连杆柔性关节机械臂实验平台及其控制效果图
