
 发布时间:2024-03-28
发布时间:2024-03-28 阅读量:
阅读量:主要完成人

高羽,数学科学学院系统科学专业2021级硕士研究生,师从孙伟副教授,研究方向为非线性系统自适应控制。目前已在在国际权威期刊IEEE Transactions on Systems, Man, and Cybernetics: Systems(SCI一区、TOP、IF:8.7)、IEEE Transactions on Automation Science and Engineering(SCI一区、TOP、IF:5.6)、Applied Mathematics and Computation(SCI二区、TOP、IF:4)上发表SCI论文三篇。硕士期间参加了2023年第一届复杂系统与智能科学国际年会(CSIS-IAC 2023)并作学术报告,获得了聊城大学研究生学业奖学金一等奖和二等奖。
创新成果展示
所提出的部分控制方案可以针对导弹制导、紧急制动等许多时间临界领域在提前任意指定的预设时间内实现控制目标。此外,考虑了控制方向未知、控制增益未知、传感器量测误差、状态不可测量等因素对控制系统的稳定性和鲁棒性的影响,可以应用到柔性关节机械臂系统、质量弹簧减震器等。此外,部分研究成果提出的稳定性判别和控制器设计方法为采样间隔的设置提供指导,并且设计网络化控制系统达到最优性能的控制器。比如 汽车制造行业中汽车主动悬架系统的最大采样间隔,最大可允许时延的估计,以及使得汽车悬架系统有更好的性能的控制器设计。

图1 二连杆柔关节机械臂装置
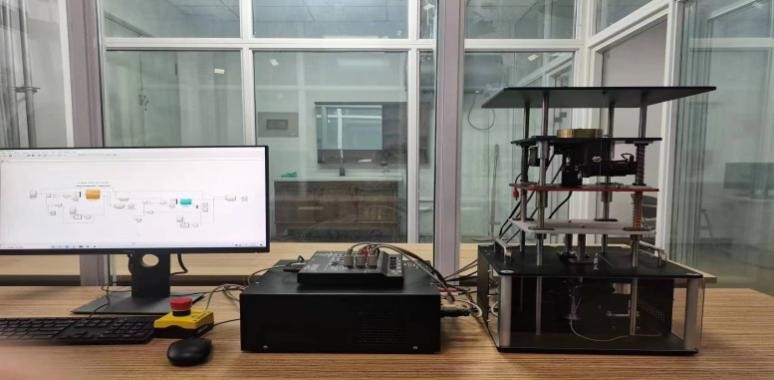
图2 车辆主动悬架装置
